Pilot Report
To any person who has ever uttered the phrase, “Those who can’t do, teach,” I’d like to extend an invitation: spend a day on the flight line with Dr. Scott Burgess of the Embry-Riddle Aeronautical University Worldwide Campus Department of Flight. For myself, I’ve always had the utmost respect for the teaching profession, so I was delighted to be recruited for this mission—although my enthusiasm ebbed somewhat when I learned the details.
Pictured above: Essential for demonstrating proper techniques for infrastructure inspection using drones is a close-up view of the maneuvers that are required — a subject best understood from the prospective of another drone flying nearby.
I would be operating a drone a few feet from a highway bridge while another drone, piloted by Dr. Burgess, flew a few feet from mine. I’ve done proximity flying on several occasions in my career, and more than once I’ve seen it end badly: that sickening crunch when a propeller strikes an external object, followed by the inevitable fall to the ground below. Except, in this case, we’d be flying over the Deschutes River, so at least I wouldn’t have to gather up the broken pieces if something went wrong.
Needless to say, I was curious to learn what specific circumstances required us to undertake such a hazardous mission. Scott told me: “We’re developing a course for the Office of Professional Education, SUAS 1400, which focuses on infrastructure inspection. My goal is to show the students how to perform these maneuvers in a real-world setting, but that’s a significant challenge in an online course.
“If you take video from the ground, the distance, the perspective and the problem of depth perception make it hard to appreciate what is happening and how close to the subject you actually need to get. By capturing video of the drone doing the inspection from another drone, the students get a much more realistic perspective on what is required.”

Large structures with sides at right angles to each other have the potential to create vortexes when air moves past them, causing small drones to behave in dangerous and unexpected ways.
Radio Silence
This mission was made modestly more complex by the fact it took place in controlled airspace: a cylinder of Class D surrounding Redmond Municipal Airport, which extends from the surface to 2,500 feet above ground level (AGL). The UAS Facility Map for the area showed a ceiling of 400 feet AGL—so no different from an operation occurring in uncontrolled airspace, and clearance was available through the Low-Altitude Authorization and Notification Capability (LAANC) system.
Typically when I’m operating in controlled airspace or near an airport, I use a hand-held aviation radio to listen in on local air traffic, to provide increased situational awareness regarding crewed aircraft in the vicinity. In this instance, there was an obvious choice: 124.5 MHz, the Redmond tower frequency. However, in this case, I decided against using my radio. First of all, our operations would be occurring almost exclusively below the level of the surrounding terrain, in the channel of the Deschutes River, which the bridge was built to span. This is not exactly a conducive flying environment for the small commercial jetliners that shuttle people to and from central Oregon.
Furthermore, with two drones operating in close proximity to each other and a fixed structure, communication between Scott and me was going to be critical. The crackle of radio traffic announcing that a pilot was setting up for final approach 2,000 feet above our heads would be totally irrelevant and might prove a distraction at a crucial moment.
Another consideration surrounding the planning for this mission was the aircraft selection. Scott specifically requested I bring out the Parrot Anafi for its unique look-up capability, which makes it ideally suited to inspecting the underside of structures. In itself this was not a problem: I enjoy flying the Anafi and find it to be a capable aircraft for its small size and modest price. And, on the plus side, if I was going to lose an aircraft on this mission, it’s among the cheapest in my fleet.
This did pose a problem, however: I make it a habit on all my professional operations to bring two aircraft with me—so that I am able to keep flying in the event of a system failure or a crash. However, no other aircraft that I possess has the same capabilities as the Anafi. So, beyond conducting a careful pre-flight inspection and making sure that I had a full set of spare propellers on hand, along with the specialized tool required to replace them, there wasn’t much I could do to protect the success of this mission from a single point of failure: the aircraft itself.

This operation was conducted just southeast of Cline Falls Air Park, at the intersection of Oregon Highway 126 and the Descutes River—making the location easy to identify on the Klamath Falls sectional chart.

Imagery captured by drones has the potential to identify damage to infrastructure, like bridges, that could indicate the need for repairs: such as cracked concrete and rust stains that might indicate rebar reinforcements are exposed to the elements.
The Edge of Space
A retired military helicopter pilot qualified to fly the AH-1 Cobra, the UH-1 Iroquois, the OH-58 Kiowa along with several other rotorcraft, Scott introduced me to a concept I had not heard of previously: the edge of space.
“The ‘space’ we’re talking about here is the open air we have available to maneuver the aircraft,” he said. “The edge of space is defined by objects that would prevent the rotors from turning, and then—boom. If you’re inspecting a 200KV power line in a manned helicopter, we need to get close enough so that we can see it, but not too close. In that case, the power line defines the edge of space.”
In this environment, the edge of space was the highway bridge, and our aircraft would be coming within feet of it to conduct this “inspection,” so that Scott’s future students could get a realistic idea of what it takes to do this type of work.
Conducting an inspection like this, even without the added complication of recording the process from a second aircraft, is not a project suitable for novice pilots. In addition to all of the knowledge required to earn a Remote Pilot In Command (RPIC) certificate under 14 CFR Part 107, you must possess proven, hands-on flying skills. Establishing a benchmark for those practical skills is the goal of the Trusted Operator Program (TOP), developed by the Association for Unmanned Vehicle Systems International (AUVSI).
There are three levels of TOP certification. Level 1 builds on the knowledge required to become an RPIC, with expanded knowledge on a range of subjects including aeronautics, risk management and pre-flight site surveys. To earn a TOP Level 2 certification requires additional training and a hands-on professional flight assessment (PFA), where candidates must demonstrate their skills on a National Institute of Standards and Technology (NIST)-type course. Level 3 also requires a PFA, as well as proven specialization in one particular aspect of drone operations.
Scott and I both hold TOP Level 3 certificates as Remote Pilot Instructors (RPIs) so, on paper, we were the right people for the job. I had every confidence in Scott’s abilities, but given my own previous close encounters with the edge of space, I still found the challenge daunting.

A set of power lines running along Oregon Highway 126 created an additional hazard to flight operations while using drones to inspect a bridge across the Deschutes River.
On Site
Arriving at the bridge, we had to hike down a foot path carrying our aircraft and other gear with us. Examining the site as we walked, a few additional hazards emerged. First, there was a set of power lines running alongside the bridge. They were perhaps 50 feet above the deck and set back about 100 feet. While they did not pose an immediate hazard to flight operations, their presence meant that blindly pulling up and away from the bridge if things started to go wrong was not going to be an option. In this environment, even our escape maneuvers would have to be careful and controlled. Also, there was a steady stream of traffic across the bridge, and we both recognized that a drone popping up over the guardrail could startle a passing driver so we set a ceiling for ourselves that would keep us safely below their eye line.
The final challenge posed by the environment was a strong wind blowing upstream through the river channel. Although the METAR from Redmond Municipal Airport was reporting a manageable five-knot wind out of the west, what we encountered was a good deal stronger and blowing south. While I’m certainly not a meteorologist, I assumed that this had something to do with the desert topography: a result of the moving air being channeled along the riverbed and under the bridge.
This development was a particular concern given our planned mission. Objects with large, flat surfaces and 90-degree angles—in other words, most structures engineered and built by human hands—tend to create turbulence and vortexes as air moves past them. The result can be eddies that, paradoxically, draw lightweight aircraft toward them, even against the prevailing winds. At 320 grams, the Anafi is a very lightweight aircraft indeed.
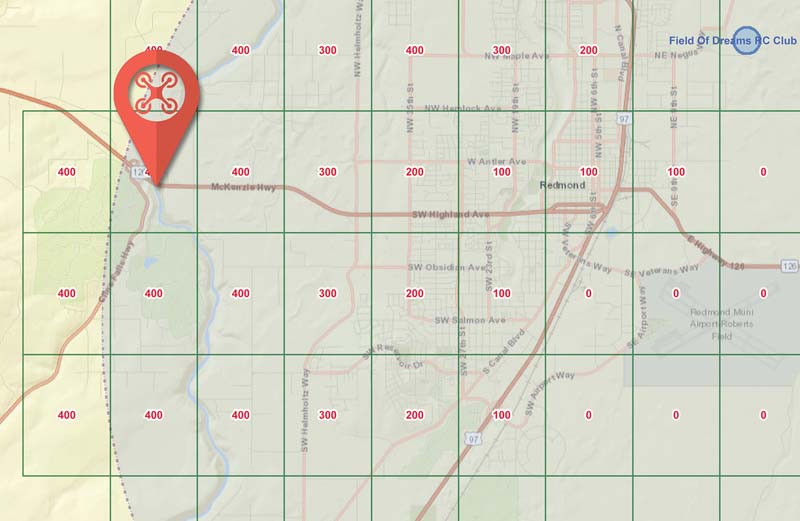
Located just inside the Class D airspace surrounding Redmond Municipal Airport, the ceiling for drone operations at the mission site established on the UAS facility map is 400 feet above ground level (AGL), with approval through the Low-Altitude Authorization and Notification Capability (LAANC).

A set of power lines running along Oregon Highway 126 created an additional hazard to flight operations while using drones to inspect a bridge across the Deschutes River.
Up and Away
With Scott at the controls of a DJI Mavic and me guiding the Anafi, we set up our first maneuver demonstration: my aircraft moving parallel to the side of the bridge, its camera facing a row of metal anchors securing its deck to the foundation. It was immediately clear that the only way for me to maintain the correct distance and elevation was to rely entirely on the drone’s video downlink, displayed on my smartphone.
This made me blind to the rest of the flying environment, like I was looking at the world through a soda straw—an exquisitely uncomfortable perspective for any pilot. Furthermore, as with all digital video links used by modern drones, there was about a half-second delay between what I was seeing on my screen and what was happening in the real world. Put another way: by the time I could recognize I was getting too close to the bridge, I could have already hit it.
Although the limits of human depth perception made using the video downlink the only practical means of maintaining my position, I still caught myself glancing up at the aircraft, which only served to disorient me further. With the Anafi in motion and the Mavic hovering nearby, I had to put my absolute trust in Scott to keep his machine clear of mine, because I would never see it before hearing the awful crunch.
Clear, timely communication is absolutely essential to complete a mission like this safely. Scott and I were constantly checking in with each other, repeating back what the other person had said to ensure there was no misunderstanding. Each movement was confirmed before it was made, but still I found it hard to commit the aircraft based solely on Scott’s disembodied voice and the video on my screen. Especially at the beginning, progress was grudging, but we made it nonetheless.

The Parrot Anafi is unique among inexpensive multirotor drones for the ability of its camera gimbal to look straight up, making it ideally suited for inspecting the underside of suspended infrastructure, like bridges.
Text & photos by Patrick Sherman
Patrick Sherman is adjunct faculty in the Department of Flight at the Embry-Riddle Aeronautical University Worldwide Campus.